̽��DLP®NIRscan™ Nano����ģ��
���켫���ҵ�Ƶ������Ϊ����ʦ�Ϳ�����Ա�����ǵĹ��������ҵ�һ��������Ԫ�������һ�����ѷ����������Ƕ���Ħ���¥�����Ǽ��ɵ�·���ڲ����̽ṹ���Ǿ����Ƿ��ܹ���ת���õĹؼ�֮һ����˵����������˭���������������ƻ��������Ѷ���������һ̽�����أ�����������빤������йصļ���ֶ�����Сʱ��ѿ��������ӡ��������ǰ����Ķ������������䡣
��Ȼ��ˣ����Ǿʹ��㿴һ��DLP NIRscan Nano����ģ��(EVM)���ڲ����죬���ǽ����ϰ취����������
��Ҫע����ǣ��κζԹ�����IJ�ⶼ��ʹNIRscan Nano EVM�ı���ʧЧ�����⣬ȥ���������ϵ����ӻ�ʹ�ҳ����۹��ۼ��ڹ�ѧ�����ϣ��Ӷ�Ӱ�쵽ϵͳ���ܡ����⣬ȥ����������ӻ��ƶ���ѧ�����������̽������������ЩԪ����λ���Ӷ���Ҫ�������½��ж���У����һ��������죬����Ҫ��InGaAs̽������DLP2010NIR��������ϵͳ����У��
��֮һ�仰�����¶������ڼ��ﳢ�ԡ�
���������������һ�¡�����DLP�ķֹ����һ����Բ���ѡ�������������(DMD)�͵���̽����ȡ���˴�ͳ��������̽������ͨ����������ض����������Ӧ��һ�龵�У���Ӧ���߱�ָ��̽��������������ͨ��ɨ��DMD�ϵ�һ�龵�У����Լ�������չ��ס�
������(NIR)�������ڵ�DLP�������ṩ�������ƣ�
�� ��ʹ�þ��м�С���ص���������̽������ȣ�ʹ�ø���ĵ���1����̽������ʵ�ָ������ܡ�
�� ʹ�õ�Ԫ̽�����͵ͳɱ���ѧ�����ܰ���ʵ�ָ��͵�ϵͳ�ɱ����߷ֱ���DMDʹ�ö���ͼ���ܹ�����ÿһ������ϵͳ�Ĺ�ѧʧ�档
�� �����źŵIJ���������DMD��ȴ�ͳ��������Ĺ�չ��(etendue)������Ҳ����������١����Լ��ɱ�̵���ʾģʽ�������˲�����ơ�
�� �����ɱ����ʾģʽ��DLP�ֹ���ܹ���
o ͨ������һ�������е������������ı䵽��̽�����Ĺ��ǿ�ȡ�
o ͨ�����ƾ��еĿ������ı�ϵͳ�ķֱ��ʡ�
o ͨ��ʹ��һ��Hadamardͼ�������һ��ͼ���ڲ���������Ĺ⡣Ȼ�����IJ������ݿ�ͨ�������ȡ��ÿ��ģʽ�ڴ�DMD����������50%���Ӷ����������ᵽ����ɨ�跽ʽ��ȡ�ĸ�ǿ���ź�����̽������
o ʹ�ö��ƹ����˲�����ѡ����Ҫ���ض�������
Ŀǰ��DLPNIRscan Nano EVM����֧�ֿɱ�ֱ��ʺ�Hadamardͼ�Ρ��ݲ�֧�ֿɱ�ǿ�ȺͶ��ƹ����˲�����
���������ͼƬ�У�����Կ���DLPNIRscan Nano EVM����Ҫ�����
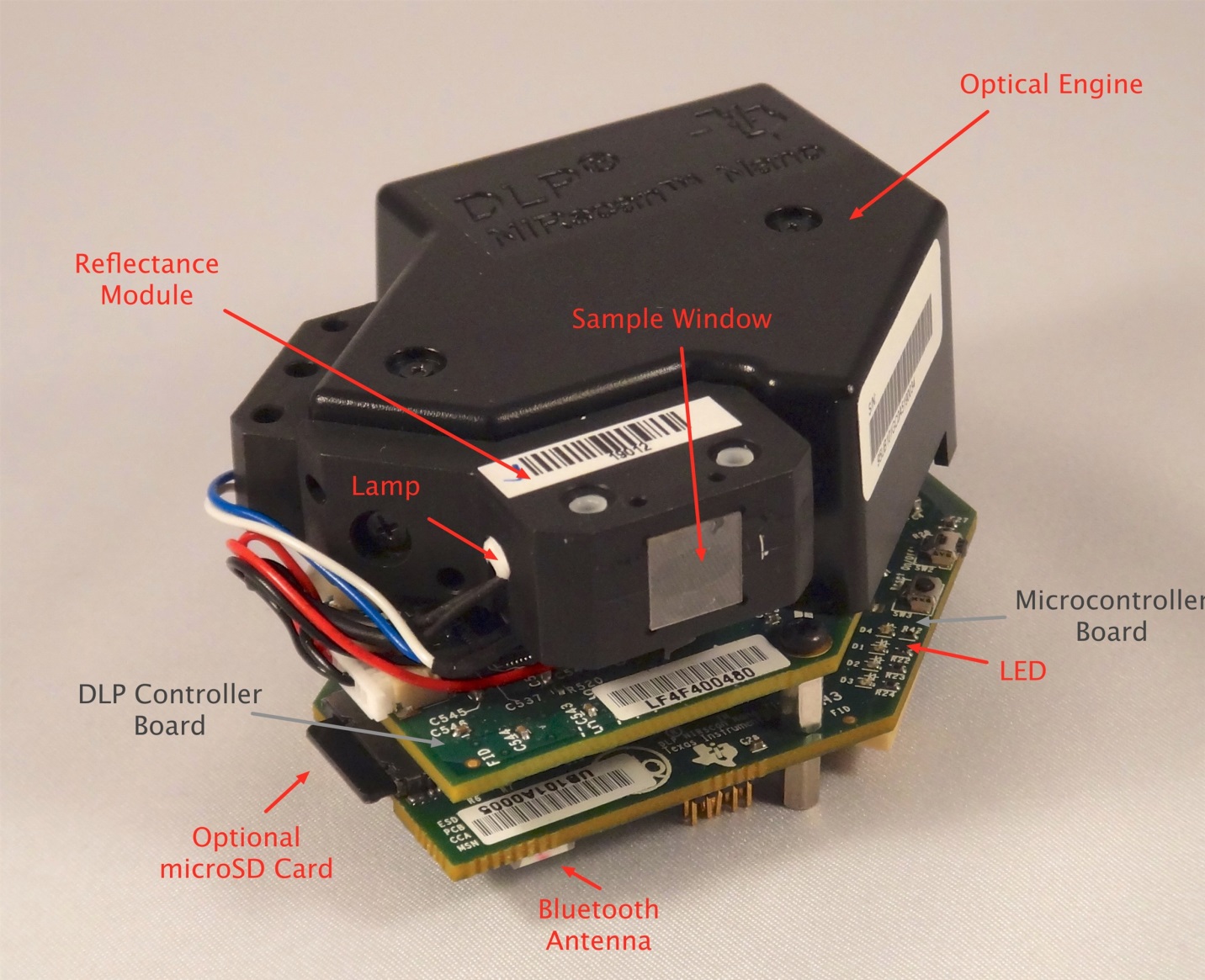
�õ����������Ӻ��Կ���DMD��̽������·�壺

���ڣ���������õ�����ʽģ�飬����Կ������죺

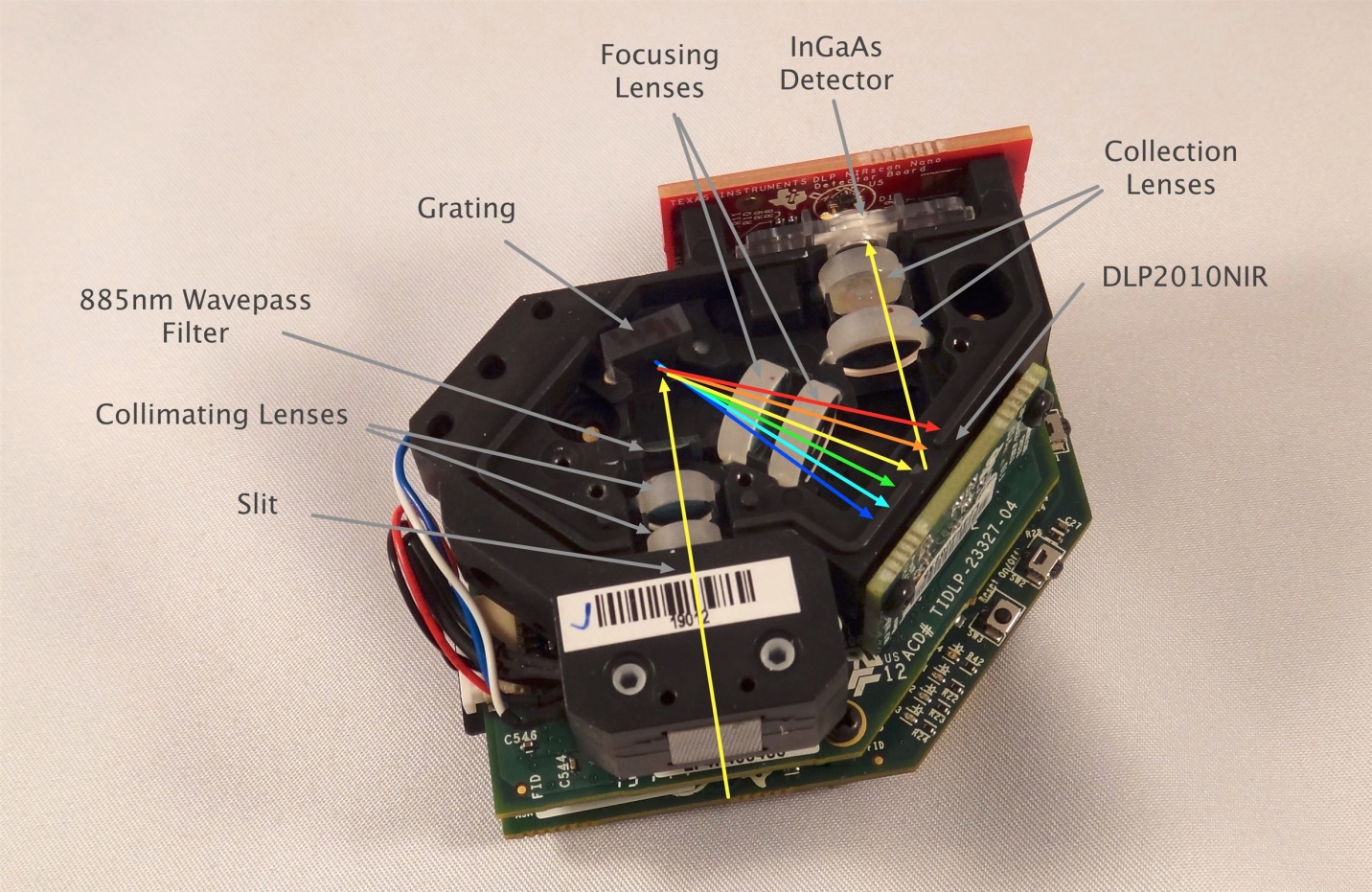
���ڣ������Ѿ����Զ����������һ�����ࡱ�ˣ�����������һ��������ζԹ���в��ݵġ�
�������Ϸ���صĹⱻ�ɼ���ͷ���Ѽ�������ͨ����������۽��ڹ������ϡ���ѡ�������ߴ��ܹ�ƽ�Ⲩ���ֱ��ʺͷֹ�Ƶ������(SNR)������ֹ��ʹ��һ�������ֱ�Ϊ1.69���� x 25�����졣ͨ������Ĺ��ڵ�һ�龵ͷ��У��ͨ��һ��885���׳��IJ�ͨ�˲�����Ȼ�����һ�������դ�ϡ������۽��������һ��Ĺ�դ����ԴɫɢΪ����������������(��ɫ����)���۽���������ͼ��չ����DLP2010NIRDMD�ϡ��������ͼ��IJ�ͬ����ˮƽ�ֲ���DLP2010NIRDMD�ϡ���ѧϵͳ��900���IJ���������DMD��һ���ϣ���1700���IJ�����������һ���ϣ������м䰴˳��ɢ����������������
 �켫��ý�� ���Ƽ���Ѷ
�켫��ý�� ���Ƽ���Ѷ

- ���ɴ���4K��ͥӰԺ ����TK850ͶӰ������
- �߶˿���ӰԺ����֮ѡ�������������i960L��ʵ��˵��
- �����뻭�ʼ�� �߶�ӰԺ��ѡ�����������i960L
- �Ӽҹ�Ӱ������ ���˾�Ų�����۵ļ���4K�������A2 Pro
- ���ѡ��һ̨����ͶӰ�� û����Щ�����ӳֳ���Ҫ�Ի�
- �ÿ�������ӰԺ ��ͼ��HD39HDRͶӰ������
- ��Ԫ�����齨��4K��ͥӰԺ ����TK800MͶӰ����������
- ���ܼ�˿Ƽ��� ����LX700����ͶӰ�������кü�








- ��ͼ��UHZ916��38999
- ���AL-F450��26999
- ����LW730��21999
- ����LH730��25999
- ���AL-DH560��37199
- ����PT-LMZ425NC��13888
- ����HT6550L��49999
- ����TB4921K��17999
- ����V8-4K��44999
- ����PZ2314��17999

 X
X




